Описание
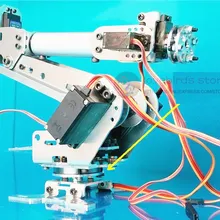
ABB irb 460 промышленная Роботизированная рука модель
Ось палетизатор ЧПУ 4-DOF модель манипулятора
Для обучения и эксперимент

Особенности модели робота:
Нагрузка: около 300 г, чем меньше угол Опора чем больше
Имитировать реальную структуру руки робота-палетизатора, моделированные детали
Рама из ПВХ, обработка ЧПУ
С помощью трех MG996r меди Передач 13 кг/см крутящий момент сервоприводы 180 градусов
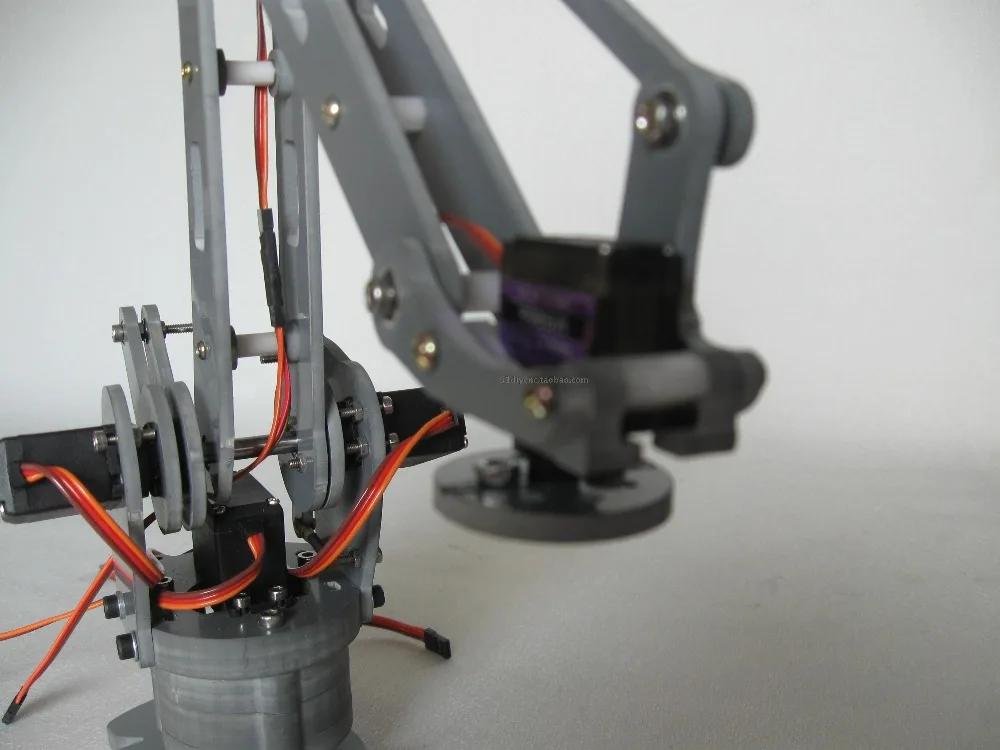
Подвижные части (соединение) с использованием подшипникового соединения
Без логотипа товары Изделия для телефона
Обеспечить демонстрация программы
Модификации винты
Модель манипулятора в сборе, тестовая доставка
Предоставьте учебники arduin0, манипулятор управления исходным кодом
Сервоманипулятор с использованием модели, ориентированный на обучение и тестирование, не подходит для работы в трубопроводе
Сервоманипулятор с использованием общей редукционной передачи, сервопривод на запястье имеет свободный ход около 4 мм
Посылка список:
Товар 1: только рама с сервоприводом (в сборе)
Пункт 2: полный комплект (рамка + контроллер + блок питания)
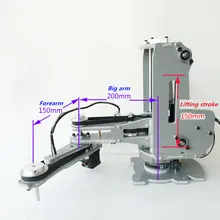
Размер:

Деталь:



Пример управления роботизированной рукояткой: (управление arduin0, примеры показывают, что угол поворота видео немного отличается)

Управление пример кода:
/Развертки
# Включает <сервопривод. h>
Servo myservoA;/создаем сервообъект для управления Сервоприводом
Servo myservob;
Servo myservoc;
Servo myservod;
Int pos = 20;/Переменная для хранения положения сервопривода
Недействительными установки ()
{
MyservoA. attach (9);/прикрепляет сервопривод на pin 9,10, 11,6 к объекту сервопривода
MyservoB. attach (10);
MyservoC. attach (11);
MyservoD. attach (6);
}
Недействительными петля ()
{
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write (int (map (pos, 1,1000, 65,30);/скажите сервоприводу, чтобы перейти к позиции в переменной «pos'
MyservoC. write (int (map (pos, 1,1000, 50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos <500; pos + = 1)
{
MyservoB. write (карта (pos, 1500, 30,65);
MyservoC. write (map (pos, 1500, 70,50);
MyservoA. write (70);
Задержка (1);
}
Для (pos = 0; pos <500; pos + = 1)
{
MyservoA. write (map (pos, 1500, 70150);
MyservoD. write (map (pos, 1500, 0180);
Задержка (1);/ждет 1 мс * 500 для сервопривода, чтобы достичь положения
}
Для (pos = 0; pos <1000; pos + = 1)
{
MyservoB. write (карта (pos, 1,1000, 65,30);
MyservoC. write (map (pos, 1,1000, 50,70);
Задержка (1);
}
Задержка (1000);
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoB. write (карта (pos, 1,1000, 30,65);
MyservoC. write (map (pos, 1,1000, 70,50);
Задержка (1);
}
Для (pos = 0; pos <= 1000; pos + = 1)
{
MyservoA. write (map (pos, 1,1000, 150,70);
MyservoD. write (map (pos, 1,1000, 180,0);
Задержка (1);
}
Характеристики
- Бренд
- jongkhurun
- Вид анимации
- Китай
- Тема
- Роботы
- Тип товара
- Модель
- Характеристики
- Корпус робота
- Степень готовности
- Полуготовый продукт
- Тип куклы
- Модель
- Размеры
- 105*140*152mm
- Номер модели
- ABB irb460
- Комплектация
- Набор солдатиков
- Размер
- 40 см
- Пол
- Унисекс
- Серийный номер производителя
- Робот
- Возрастной диапазон
- > 14 лет
- Дистанционное управление
- Да
- Состояние
- Товары в наличии
- Материал
- PVC + metal
Сопутствующие товары